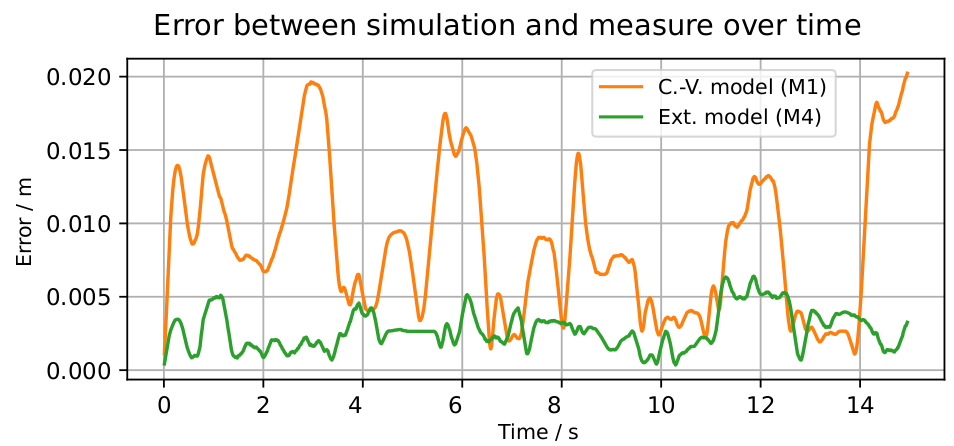
Better Actuator Models
Extended friction models for the physical simulation of servo actuators. The proposed models significantly reduce the sim-to-real gap, which is particularly important in reinforcement learning.
Fall Recovery And Stand Up Agent
Framework for the training of a fall recovery and stand up reinforcement learning agent for humanoid robots. Based on the CrossQ algorithm, the framework utilizes the MuJoCo physics engine for simulation during training.
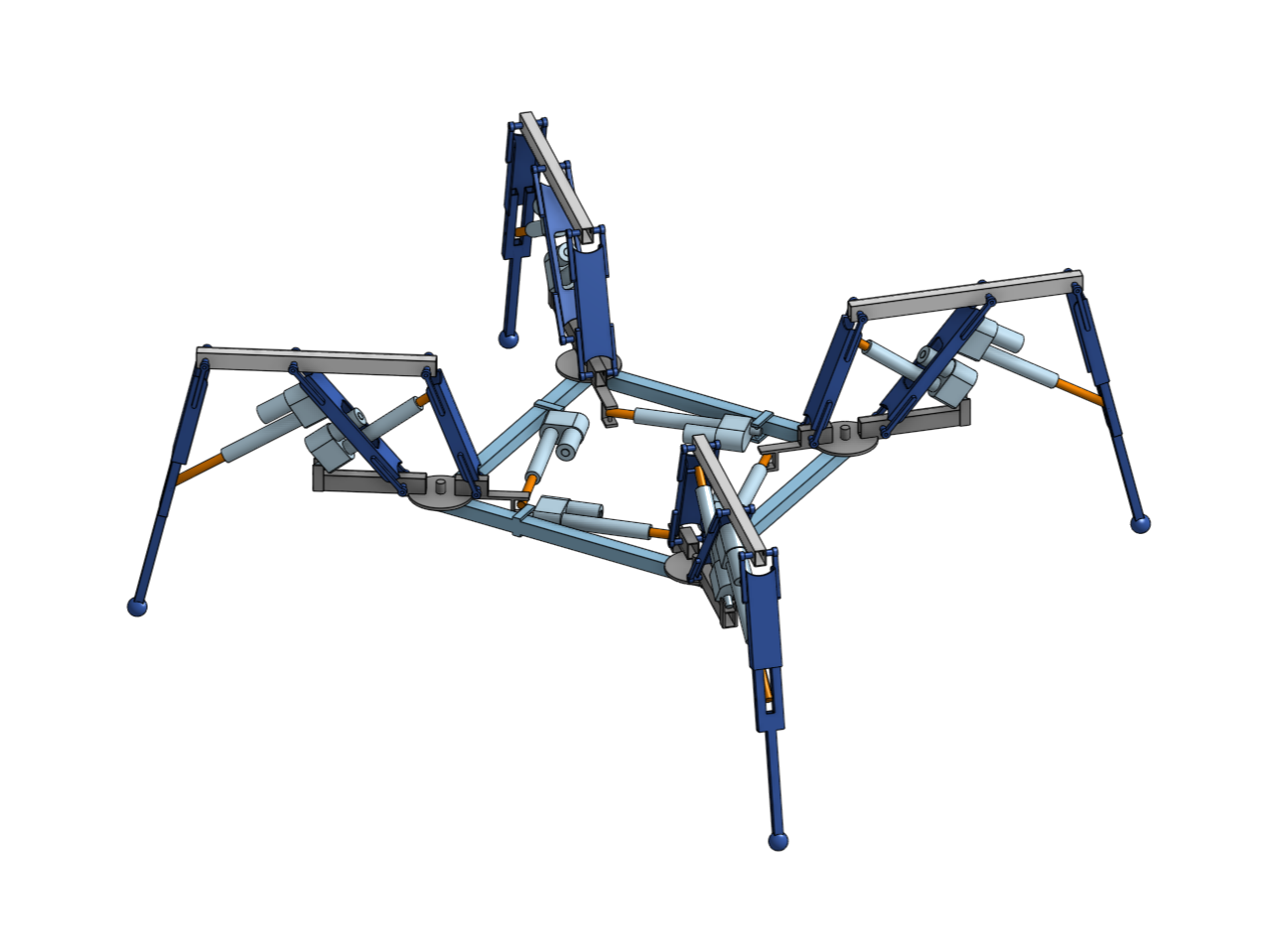
Megabot
The objective of this project is to implement a curved walking algorithm on a large-scale quadruped robot with electric actuators: the Megabot. It is divided into three main parts: developing the robot's control through its kinematic modeling, planning its gait, and simulating it in PyBullet.
Pneumatic artificial muscles
Pneumatic artificial muscles, also called McKibben muscles, are actuators invented in the 1950s. These are devices that contract in a manner similar to biological muscles when activated by compressed air.
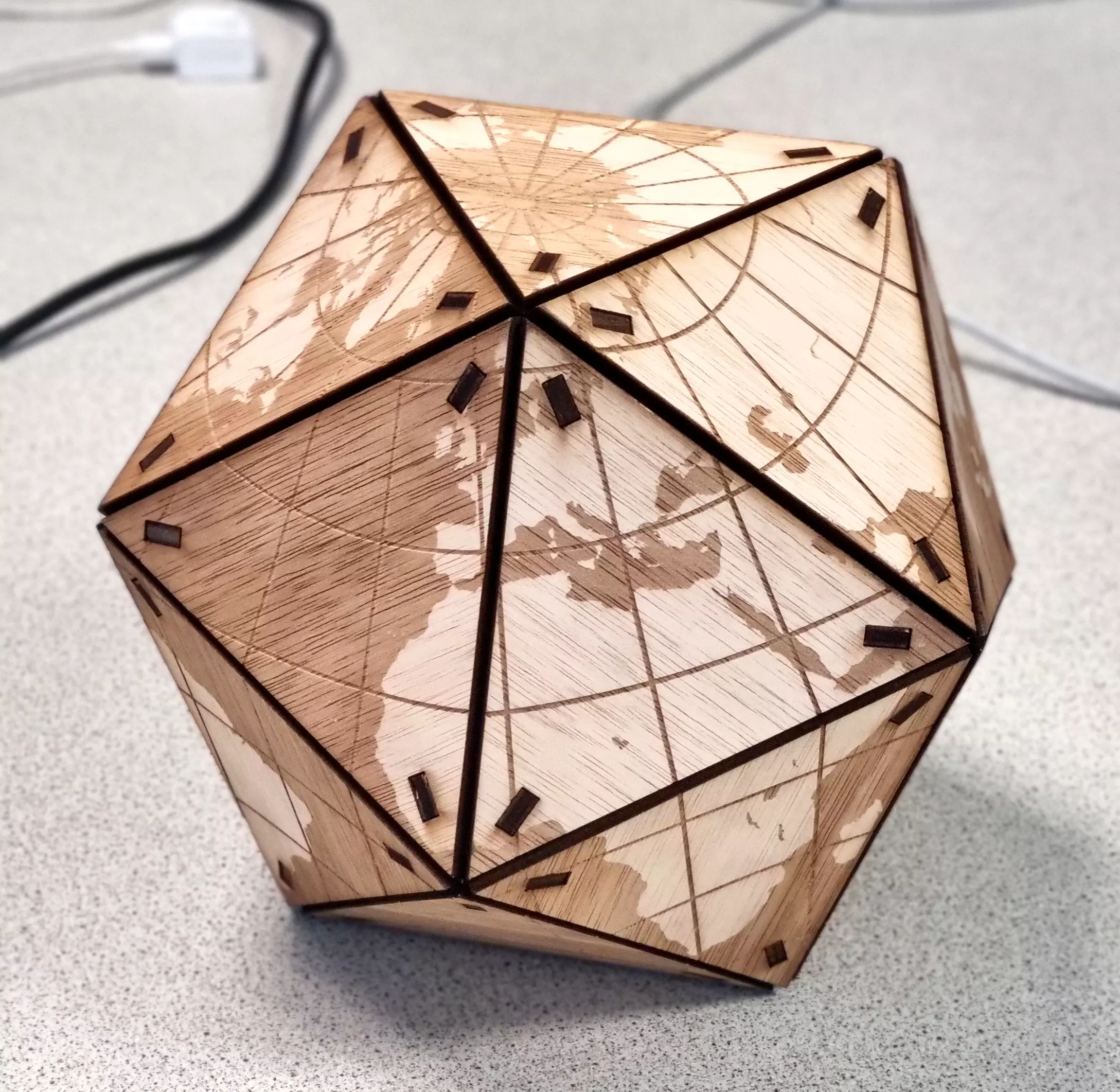
Dymaxion Globe
The Dymaxion Globe is a decorative object representing the Earth in accordance with Fuller's icosahedral projection. The use of this projection to create a globe is primarily an aesthetic choice.
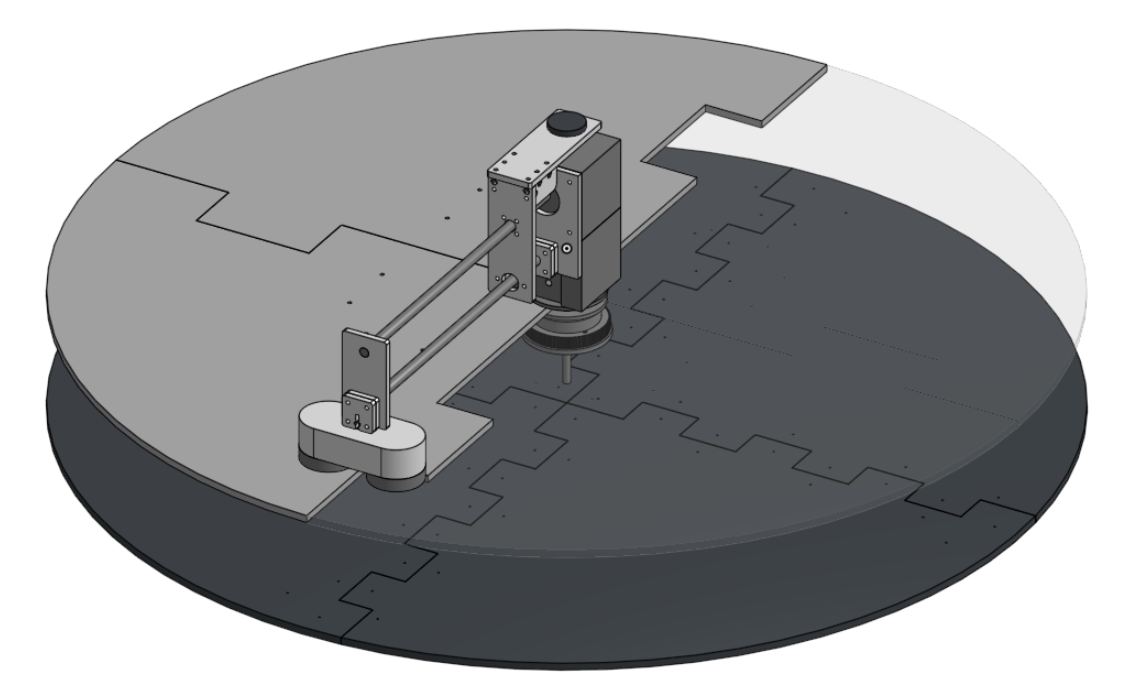
Sand Table
This project aims to create a coffee table with a transparent top that reveals a thin layer of sand, where a steel ball draws geometric patterns. The design and construction of the hidden mechanism used to move the ball using a magnet is the core focus of the project.